भारतीय प्रौद्योगिकी संस्थान इंदौर Indian Institute of Technology Indore
IIT Indore
भारतीय प्रौद्योगिकी संस्थान इंदौर Indian Institute of Technology Indore
IIT Indore
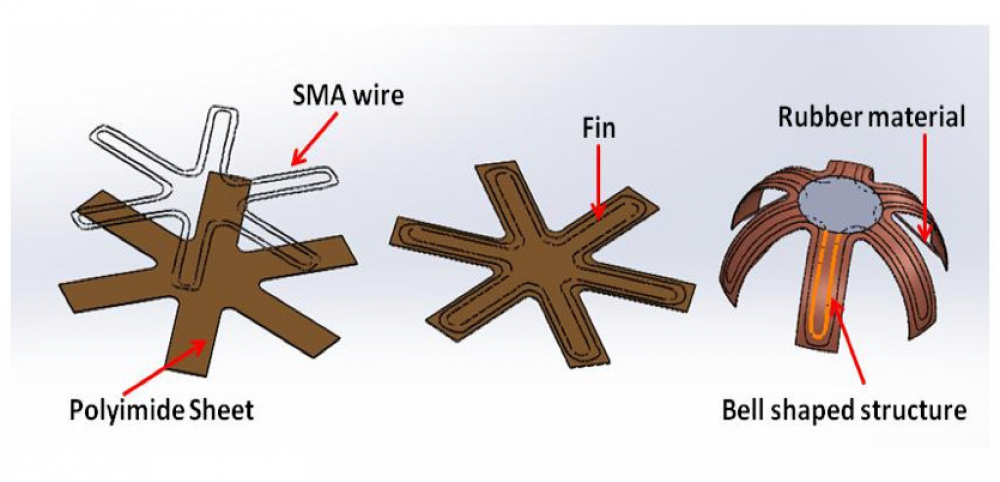
Mechatronics and Instrumentation lab has fabricated Shape Memory Alloy (SMA) actuated bio-inspired, soft robotic jellyfish. Underwater vehicles play a major role in the study and monitoring of marine life. The limitation with conventional rigid body vehicles are noisy, high self-weight and harmful for the underwater creatures. Soft robotics is an emerging field of study in which the robot is fabricated using soft polymers and flexible reinforced sheets which is compliant in nature. Instead of a conventional motor based actuator, the soft robots use smart actuators such as Shape memory alloy, piezoelectric, ionic polymer-metal composite for its actuation. The work involves the design, fabrication, modeling and hydrodynamic analysis of SMA wire actuated soft robotic jellyfish.
